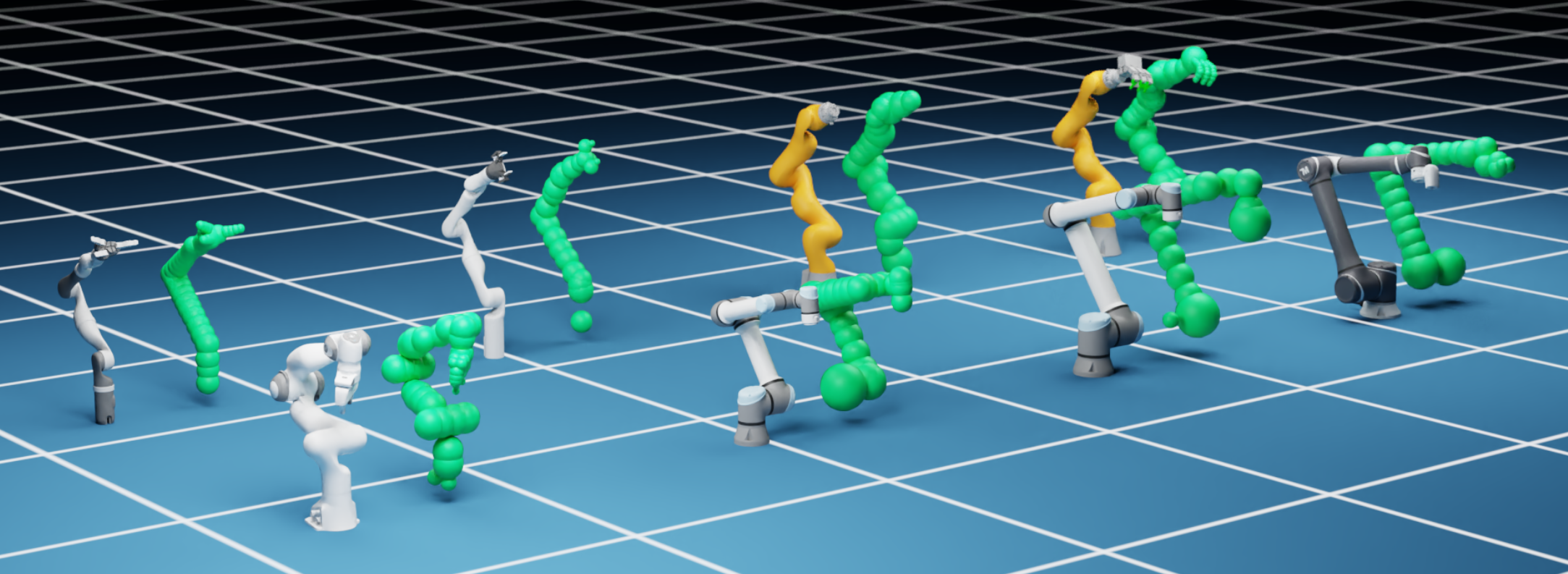
Supported Robots¶
Robot File |
Information |
|---|---|
franka.yml |
Franka Panda Robot |
ur5e.yml |
Universal Robots UR5e |
ur10e.yml |
Universal Robots UR10e |
tm12.yml |
Techman TM12 |
jaco7.yml |
kinova Jaco 7 |
kinova_gen3.yml |
Kinova Gen3 |
iiwa.yml |
KUKA IIWA |
iiwa_allegro.yml |
KUKA IIWA with an Allegro Hand as end-effector |
franka_mobile.yml |
Franka Panda with a mobile base (linear x, linear y and rotation about z). |
In addition to these robots, cuRobo has multi-arm robots which are not supported for motion generation but can be used for kinematics and collision checking queries.
Robot File |
Information |
|---|---|
dual_ur10e.yml |
Two Universal Robots UR10e represented as a single robot. |
tri_ur10e.yml |
Three Universal Robots UR10e represented as a single robot. |
quad_ur10e.yml |
Four Universal Robots UR10e represented as a single robot. |